
SPG:Slope Physics
From Sonic Retro
Notes:
- The research applies to all four of the Sega Mega Drive games and Sonic CD.
- This guide relies on information about tiles and sensors discussed in Solid Tiles
- Following only describes how Sonic collides and interacts with solid tiles. Solid objects, such as Monitors, Moving Platforms, and Blocks each have their own collision routines with Sonic and don't necessarily behave exactly the same as the tiles do. For this, refer to Solid Objects.
- Variables and constants for Sonic and other characters such as xpos and acc will be referenced frequently, they can be found in Basics.
Introduction
Once you have Sonic able to collide with solid tiles, he needs to move correctly over the terrian surface with momentum and physics. Knowing how sensors work will allow Sonic move smoothly over terrain with different heights, and knowing how Sonic's ground speed is affected by inputs to walk will allow him to move left and right, but that is not all there is to the engine. This guide will explain how Sonic reacts to certain angles, and how 360 degree movement with momentum is acheived.
Moving At Angles
Sonic's speed has to be attenuated by angled ground in order to be realistic.
There are two ways in which Sonic's ground speed is affected on angles. The first will make sure that he does not traverse a hill in the same amount of time as walking over flat ground of an equal width. The second will slow him down when going uphill and speed him up when going downhill. Let's look at each of these in turn.
The Three Speed Variables
If Sonic were a simple platformer that required nothing but blocks, you would only need two speed variables: X speed (xsp) and Y speed (ysp), the horizontal and vertical components of Sonic's velocity. Acceleration (acc), deceleration (dec), and friction (frc) are added to xsp; jump/bounce velocity and gravity (grv) are added to ysp (when Sonic is in the air).
But when slopes are involved, while Sonic moves along a slope, he's moving both horizontally and vertically. This means that both xsp and ysp have a non-zero value. Simply adding acc, dec, or frc to xsp no longer works; imagine Sonic was trying to run up a wall - adding to his horizontal speed would be useless because he needs to move upward.
The trick is to employ a third speed variable (as the original engine does), so let's call it Ground speed (gsp). This is the speed of Sonic along the ground, disregarding ang altogether. acc, dec, and frc are applied to gsp, not xsp or ysp.
While on the ground, xsp and xsp are derived from gsp every step before Sonic is moved. Perhaps a pseudo-code example is in order:
xsp = gsp*cos(angle); ysp = gsp*-sin(angle); xpos += xsp; ypos += ysp;
No matter what happens to the ang, gsp is preserved, so the engine always knows what speed Sonic is "really" moving at.
Slope Factor
By this point, Sonic should be able to handle any hills with an accurate velocity but he still needs to slow down when going uphill and speed up when going downhill.
Fortunately, this is simple to achieve - with something called the Slope Factor (slope). Just subtract slope*sin(ang) from gsp at the beginning of every step.
gsp -= slope*sin(ang);
The value of slope is always slp when running, but not so when rolling. When Sonic is rolling uphill (the sign of gsp is equal to the sign of sin(ang)), slope is slprollup ($001E). When Sonic is rolling downhill (the sign of gsp is not equal to the sign of sin(ang)), slope is slprolldown ($0050).
Note: In Sonic 1, it appears that slope doesn't get added if Sonic is stopped and in his standing/waiting cycle. But in Sonic 3 & Knuckles, slope seems to be added even then, so that Sonic can't stand on steep slopes - they will force him to walk them down.
Jumping At Angles
Jumping is also affected by the angle Sonic is at when he does it. He can't simply set ysp to negative jmp - he needs to jump away from the angle he's standing on. Instead, both xsp and ysp must have jmp subtracted from them, using cos() and sin() to get the right values.
More pseudo-code:
xsp -= jmp*sin(angle); ysp -= jmp*cos(angle);
Notice how the jump values are subtracted from the xsp and ysp. This means his speeds on the ground are preserved, meaning running up fast on a steep hill and jumping gives you the jump speeds and the speeds you had on the hill, resulting in a very high jump.
Switching Mode
So Sonic can run over hills and ramps and ledges, and all that is great. But it is still not enough. He cannot make his way from the ground to walls and ceilings without more work.
Why not? Well, because sensor A and B check straight downward, finding the height of the ground. There is just no way they can handle the transition to walls when everything is built for moving straight up and down on the Y-axis.
How can we solve this? By using four different modes of movement. This will take a little explaining.
The Four Modes
It seems pretty reasonable to assume that, because Sonic can traverse ground in 360 degrees, the engine handles all 360 degrees in much the same way. But, in fact, the engine splits the angles into four quadrants, greatly simplifying things.
To better understand what I am talking about, imagine a simpler platformer without full loops, just a few low hills and ramps. All the character would need to do is, after moving horizontally, move up or down until they met the level of the floor. The angle of the floor would then be measured. The angle would be used to attenuate gsp, but nothing more. The character would still always move horizontally and move straight up and down to adhere to floor level.
This is much like how Sonic does things. Only, when ang gets too steep, Sonic switches "quadrant", moving from Floor mode to Right Wall mode (to Ceiling mode, to Left Wall mode, and back around to Floor mode, etc). At any one time, in any one mode, Sonic behaves like a simpler platformer. The magic happens by combining all four modes, and cleverly switching between them smoothly.
So how and when does Sonic switch mode?
When in Floor mode, and ang is steeper than 45° ($E0), the engine switches into Right Wall mode. Everything is basically the same, only the sensors check to the right instead of downward, and Sonic is moved to "floor" level horizontally instead of vertically.
Now that he's in Right Wall mode, if ang is shallower than 45° ($E0), the engine switches back into Floor mode.
The other transitions work in exactly the same way, with the switch angles relative to the current mode.
When the mode is being calculated, it simply checks which quadrant Sonic's ang is currently in, which will place Sonic in the correct mode (ranges are inclusive):
Floor Mode (start of rotation) 0° to 45° (1~32) ($FF~$E0)
Right Wall Mode 46° to 134° (33~95) ($DF~$A1)
Ceiling Mode 135° to 225° (96~160) ($A0~$60)
Left Wall Mode 226° to 314° (161~223) ($5F~$21)
Floor Mode (end of rotation) 315° to 360° (224~256) ($20~$00)
Note: Since the classic games don't use degrees, and rather have angles ranging from 0 to 256, both approximate degree values and a more accurate decimal representation of the Hex values are included.
These ranges are symmetrical for left and right, but does favour the floor and ceiling modes, with their ranges being a degree or two wider.
You might rightly ask where the ground sensors are when in Right Wall mode. They're in exactly the same place, only rotated 90 degrees. Sensor A is now at Sonic's ypos+9 instead of xpos-9. Sensor B is now at Sonic's ypos-9, instead of xpos+9. Instead of vertical sensor lines, they are now horizontal, stretching 16 pixels beyond his foot level (which is now 20 pixels "below" him, at xpos+20).
Yes, because the sensors move so far, it is possible for Sonic to be "popped" out to a new position in the step in which he switches mode. However, this is hardly ever more than a few pixels and really isn't noticeable at all during normal play. To adjust for this in a new engine, an alternative method to switch mode would be to check for solid ground using a 90 degree rotated mask. For example, standing upright on flat ground, the left side would check rotated 90 degrees for steep slopes to switch to Left Wall Mode, and the right would check rotated -90 degrees for steep slopes to switch to Right Wall Mode. Only the lower ground sensor of the rotated mask would need to check for ground. This would have to exclude walls so Sonic doesn't begin walking on a wall when he gets near one, but would mean Sonic switched mode sooner on a slope which means less "popping".
One more thing: I said that solid tiles were made of height arrays. Operative word: height. How do they work when in Right Wall mode? Well, rather gobsmackingly, it turns out that in the original engine, each solid tile has two complementary height arrays, one used for when moving horizontally, the other for when moving vertically.
What about Left Wall and Ceiling mode? Wouldn't there need to be four height arrays? No, because tiles of those shapes simply use normal height arrays, just inverted. When in Ceiling mode, Sonic knows that the height value found should be used to move him down and not up.
With these four modes, Sonic can go over all sorts of shapes. Inner curves, outer curves, you name them. Here are some approximate example images with their angle values to help give you some idea of what this results in:
You can observe Sonic's mode changing on the frame after his floor angle (ang) exceeds 45°. Sonic's position shifts a bit when the change occurs, due to the totally new collision angle and position.
You may notice Sonic's mode switches erratically on the convex curve, this is because his floor angle (ang) will suddenly decrease when switching to wall mode, causing it to switch back and forth until he is far enough down the curve to stabilise. This isn't usually noticeable, and happens less the faster you are moving.
Note: The reason the gifs show the mode switch being the frame after the angle threshold is reached is simply because the collision being shown is the one used for that frame, before Sonic's ang updates.
When to Change Mode
If you've checked the guide regarding the Main Game Loop you may notice the mode switching isn't mentioned at all, that's because the game doesn't actually ever "switch" his mode. Sonic's current "mode" is decided right before collision occurs. It will measure his angle, and decide which mode of collision to use right there and then. There is no "Mode" state stored in memory. So effectively, Sonic's mode changes whenever his angle (ang) does.
Since the floor angle (ang) is decided after floor collision (as a result of floor collision) the floor collision that frame has to use the previous frames angle, even though Sonic has moved to a new part of the slope since then. This results in Sonic's mode effectively changing 1 frame after Sonic reaches one of the 45 degree angle thresholds.
Falling and Sliding Off Of Walls And Ceilings
When in Right Wall, Left Wall, or Ceiling mode and Sonic's ang is between 90 and 270, Sonic will fall any time absolute gsp falls below fall ($0280) (gsp is set to 0 at this time, but xsp and ysp are unaffected, so Sonic will continue his trajectory through the air). This happens even if there is ground beneath him. If Sonic is in Right Wall, Left Wall, or Ceiling Mode but Sonic's ang is not between 90 and 270 then the horizontal control lock timer described below will still be set to 30 but Sonic will not enter a falling state remaining in his current state.
Horizontal Control Lock
When Sonic falls or slides off in the manner described above, the horizontal control lock timer is set to 30 ($1E) (it won't begin to count down until Sonic lands back on the ground). While this timer is non-zero and Sonic is on the ground, it prevents the player from adjusting Sonic's speed with the left or right buttons. The timer counts down by one every step, so the lock lasts about half a second. During this time only slp and the speed Sonic fell back on the ground with is in effect, so Sonic will slip back down the slope.
if (abs(gsp) < 2.5 && (angle >= 45 && angle <= 315))
{
if (angle >= 90 && angle <= 270)
{
floor_mode = 0;
gsp = 0;
}
horizontal_lock_timer = 30;
}
The Air State
Any time Sonic is in the air, he doesn't have to worry about angles, gsp, slp, or any of that jazz. All he has to do is move using xsp and ysp until he detects the ground, at which point he re-enters the ground state.
Jumping "Through" Floors
There are some ledges that Sonic can jump up "through". These are often in the hilly, green zones such as Green Hill Zone, Emerald Hill Zone, Palmtree Panic Zone, and so on. The solid tiles that make up these ledges are flagged by the engine as being a certain type that should only be detected by Sonic's A and B sensors. They are ignored entirely by C and D as well as the horizontal sensor line. Finally, sensor A and B (mostly) only detect the floor when Sonic is moving downwards (but always while on the ground). So with a slightly shorter jump, you will see Sonic 'pop' upwards onto a jump through surface once he begins to fall.
Reacquisition Of The Ground
Both xsp and ysp are derived from gsp while Sonic is on the ground. When he falls or otherwise leaves the ground, xsp and ysp are already the proper values for him to continue his trajectory through the air. But when Sonic lands back on the ground, gsp must be calculated from the xsp and ysp that he has when it happens. You might think that they would use cos() and sin() to get an accurate value, but that is not the case. In fact, something much more basic happens, and it is different when hitting into a curved ceiling as opposed to landing on a curved floor, so I will cover them separately.
As you land the angle of the ground you touch is read (ang). The following covers the angle (ang) of the ground (floor or ceiling) that Sonic touches as he lands, and only happens the frame when he lands when changing from in air to on ground.
Note: Since the classic games don't use degrees, and rather have angles ranging from 0 to 256, both approximate degree values and a more accurate (and inverted) decimal representation of the Hex values are included.
When Falling Downward
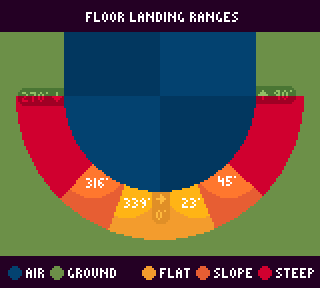
The following ranges are inclusive.
Shallow: When ang is in the range of
0° to 23° (1~16) ($FF~$F0) and mirrored: 339° to 360° (241~256) ($0F~$00)
gsp is set to the value of xsp.
Half Steep: When ang is in the range of
24° to 45° (17~32) ($EF~$E0) and mirrored: 316° to 338° (225~240) ($1F~$10)
gsp is set to xsp but only if the absolute of xsp is greater than ysp. Otherwise, gsp is set to ysp*0.5*-sign(sin(ang)).
Full Steep: When ang is in the range of
46° to 90° (33~64) ($DF~$C0) and mirrored: 271° to 315° (193~224) ($3F~$20)
gsp is set to xsp but only if the absolute of xsp is greater than ysp. Otherwise, gsp is set to ysp*-sign(sin(ang)).
When Going Upward
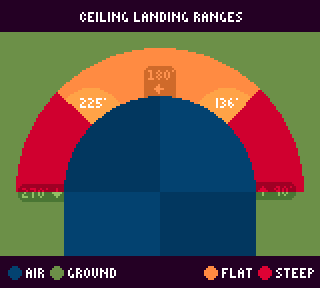
The following ranges are inclusive.
Slope: When the ceiling ang detected is in the range of
91° to 135° (65~96) ($BF~$A0) and mirrored 226° to 270° (161~192) ($5F~$40)
Sonic reattaches to the ceiling and gsp is set to ysp*-sign(sin(ang)).
Ceiling: When the ceiling ang is in the range of
136° to 225° (97~160) ($9F~$60)
Sonic hits his head like with any ceiling, and doesn't reattach to it. ysp is set to 0, and xsp is unaffected.
Air Rotation
When Sonic leaves a slope, such as running up and off a quarter pipe, Sonic's angle smoothly returns to 0.
Sonic's angle (ang) changes by
2.8125° (2) ($2)
each frame, in the direction towards 0.
- Note: Degree angle is approximate, as the original game has angles ranging up to 256. Degree, decimal, and hex have been provided.
- Note: Regardless of Sonic's angle, Sonic's air sensors do not rotate. Air collision essentially ignores Sonic's mode.