
SPG:Slope Physics
From Sonic Retro
| Sonic Physics Guide |
|---|
|
| Collision |
|
| Physics |
|
| Gameplay |
| Presentation |
| Special |
Notes:
- The research applies to all four of the Sega Mega Drive games and Sonic CD.
- This guide relies on information about tiles and sensors discussed in Solid Tiles.
- This page is essentially part 2 of 2. This details Player physics and speeds when on slopes. For part 1, describing the Player's terrain collision and 360 degree wall and ceiling collision, go to Slope Collision.
Contents
Introduction
Once you have the Player object able to collide with solid tiles, they need to move correctly over the terrain surface with momentum and physics. Knowing how sensors work will allow the Player move smoothly over terrain with different heights, and knowing how the Player's ground speed is affected by inputs to walk will allow them to move left and right, but that is not all there is to the engine. This guide will explain how the Player reacts to certain angles, and how 360 degree movement with momentum is achieved.
Slope Momentum
The Player's movement across the stage has to be influenced by angled ground in order to feel realistic.
Moving Along Slopes
| Constant | Value |
|---|---|
| acceleration_speed | 0.046875 (12 subpixels) |
| deceleration_speed | 0.5 (128 subpixels) |
| friction_speed | 0.046875 (12 subpixels) |
| top_speed | 6 |
| gravity_force | 0.21875 (56 subpixels) |
In order for angled movement to be accurate, we need to make sure that the Player does not traverse an incline slope in the same amount of time as walking over flat ground of an equal width.
If Sonic were a simple "slope-less" platformer that required nothing but flat blocks, you would only need two speed variables: X Speed and Y Speed, the horizontal and vertical components of the Player's velocity. acceleration_speed, deceleration_speed, and friction_speed are added to X Speed; jump/bounce velocity and gravity_force are added to Y Speed (when the Player is in the air).
But when slopes are involved, while the Player moves along a slope, they're moving both horizontally and vertically. This means that both X Speed and Y Speed have a non-zero value. Simply adding acceleration_speed, deceleration_speed, or friction_speed to X Speed no longer works; imagine the Player was trying to run up a wall - adding to their horizontal speed would be useless because they need to move upward.
The trick is to employ a third speed variable (as the original engine does), Ground Speed. This is the speed of the Player along the ground, disregarding Ground Angle altogether. acceleration_speed, deceleration_speed, and friction_speed are applied to Ground Speed, not X Speed or Y Speed.
While on the ground, X Speed and Y Speed are entirely derived from Ground Speed every step before the Player is moved. Perhaps a code example is in order:
// Calculate X and Y Speed from Ground Speed
X Speed = Ground Speed * cos(Ground Angle)
Y Speed = Ground Speed * -sin(Ground Angle)
// Actually move via X Speed and Y Speed
X Position += X Speed;
Y Position += Y Speed;No matter what happens to the Ground Angle, Ground Speed is preserved, so the game always knows what speed the Player is "really" moving at.
What's more, is that the position the Player is moved to with X Speed and Y Speed are where the player will next check for collision with the floor, so it is vital that the next position the player moves to for the next frame's checks aligns as much with the current slope direction as possible.
Slowing Down Uphill And Speeding Up Downhill
By this point, the Player should be able to handle any basic hills with an accurate angular motion, however they still need to slow down when going uphill and to speed up when going downhill. This is essentially a "gravity" being applied while on the ground, and is what makes slopes hard to climb but easy to run down. Fortunately, this is simple to achieve - with something called the Slope Factor.
While the player moves along slopes, a value called Slope Factor is used to modify the Player's Ground Speed. Just subtract Slope Factor * sin(Ground Angle) from Ground Speed at the beginning of every step. This only happens if the Player is not in Ceiling mode.
What is the value of Slope Factor?
| Constant | Value |
|---|---|
| slope_factor_normal | 0.125 (32 subpixels) |
| slope_factor_rollup | 0.078125 (20 subpixels) |
| slope_factor_rolldown | 0.3125 (80 subpixels) |
The value of Slope Factor is always slope_factor_normal when running, but not so when rolling. When the Player is rolling uphill (the sign of Ground Speed is equal to the sign of sin(Ground Angle)), Slope Factor is slope_factor_rollup. When the Player is rolling downhill (the sign of Ground Speed is not equal to the sign of sin(Ground Angle)), Slope Factor is slope_factor_rolldown.
Note:
- In Sonic 1 and 2, walking/running Slope Factor doesn't get subtracted if the Player is stopped (Ground Speed is 0). But in Sonic 3 & Knuckles, if Ground Speed is 0, the game will still subtract Slope Factor if the value of it is greater than or equal to 0.05078125 (13 subpixels). So that the Player can't stand on steep slopes - it will force them to walk down. Rolling slope factor, however, has no check for if Ground Speed is 0 in any of the games.
360 Degree Movement
So the Player can run over basic hills and ramps and ledges, and motion will be adjusted based on the angle.
As explained in Slope Collision, at steep enough angles the Player's collision setup changes mode (entirely rotates).

|
| The Player's collision modes. |
|---|
With that taken care of, the appropriate Ground Angle will be read at slopes of any direction, and the slope factor will continue to work based on this angle.
So at this point, overall slope movement for all 360 degrees will work rather well. However, it's not enough just to slow the Player down on steep slopes using Slope Factor. They need to slip back (or even fall down) when it gets too steep and they are moving too slowly.
Falling and Slipping Down Slopes
If moving too slowly on steep slopes, the Player will briefly lose horizontal control and detach from the ground. This ensures you can't walk slowly on ceilings, or slowly/gradually climb a slope forever.
The requirements for this differ in Sonic 3 onwards.
Sonic 1, 2, and CD Method
The angle range of slopes for slipping is when your Ground Angle is steeper than 45 degrees:
| Range | Values |
|---|---|
| Slipping and Falling |
46° (223) to 315° (32) |

Note: These angle ranges are not perfectly symmetrical, this is due to the efficient calculation used in the original game, rather than an intentional difference.
In addition, the game will check if absolute Ground Speed falls below 2.5 (2 pixels, 128 subpixels).
So, when these conditions are met, what happens? Well, the Player will slip. This achieved by detaching the Player from the floor (clearing the grounded state), setting Ground Speed to 0, and employing the control lock timer.

|
| Next to Sonic you can see the control lock timer. |
|---|
Here, when he gets too steep, Sonic detaches from the floor, Ground Speed is set to 0, and control lock timer is set.
But wait, why does Sonic not stop dead in his tracks if he become airborne and Ground Speed was set to 0? Well, if the floor isn't steep enough to freely fall from, the Player will immediately land back onto the floor and the Ground Speed will be restored from X/Y Speed as normal. Landing on the floor and speed conversion is further detailed up ahead in Landing On The Ground)
Okay, what about if the Player is on an even steeper floor?

You can notice he detaches from the floor and control lock is set. It doesn't tick down until he lands, and even after the timer has begun, when he crosses the gap the timer pauses. The code for both the control lock timer and the slipping are only ran when grounded.
So, what about the timer? When the Player falls or slips off in the manner described above, the control lock timer is set to 30 (it won't begin to count down until the Player lands back on the ground). While this timer is non-zero and the Player is on the ground, it prevents directional input from adjusting the Player's speed with the left or right buttons. The timer counts down by one every step when grounded, so the lock lasts about half a second. During this time only slope_factor_normal and the speed the Player fell back on the ground with is in effect, so the Player will slip back down the slope.
In the above first example gif, you may notice the control lock timer counts down twice, this is purely because Sonic happened to be too steep and too slow still when the timer ended initially, and he slipped once again, seamlessly.
So, with some example code, it works like the following:
// Is player grounded?
if player is grounded
{
if control_lock_timer == 0
{
// Should player slip and fall?
if abs(Ground Speed) < 2.5 and (Ground Angle is within the slipping and falling range)
{
// Detach (fall)
grounded = false;
// Lock controls (slip)
Ground Speed = 0;
control_lock_timer = 30;
}
}
else
{
// Tick down timer
control_lock_timer -= 1;
}
}
Sonic 3 Method
Sonic 3 works a little differently, where Sonic will slip down at angles even shallower than 45°, and only detach from the floor when at angles even steeper than 45°.
| Range | Values |
|---|---|
| Slipping | Ground Angle is within the range 35° (231) to 326° (24) inclusive. |
| Falling | Ground Angle is within the range 69° (207) to 293° (48) inclusive. |

Note: These angle ranges are not perfectly symmetrical, this is due to the efficient calculation used in the original game, rather than an intentional difference.
Not only are there these new ranges, Ground Speed is now modified by 0.5 instead of being set to 0. The Ground Speed threshold remains at 2.5 (2 pixels, 128 subpixels).
Here's how it works:
// Is the Player grounded?
if player is grounded
{
if control_lock_timer == 0
{
// Should player slip?
if abs(Ground Speed) < 2.5 and (Ground Angle is within slip range)
{
// Lock controls (slip)
control_lock_timer = 30;
// Should player fall?
if (Ground Angle is within fall range)
{
// Detach (fall)
grounded = false;
}
else
{
// Depending on what side of the player the slope is, add or subtract 0.5 from Ground Speed to slide down it
if Ground Angle < 180°
{
Ground Speed -= 0.5;
}
else
{
Ground Speed += 0.5;
}
}
}
}
else
{
// Tick down timer
control_lock_timer -= 1;
}
}Landing On The Ground
While the Player is grounded, both X Speed and Y Speed are constantly derived from Ground Speed. When they fall or otherwise leave the ground, X Speed and Y Speed are already the correct values for them to continue their trajectory through the air. But when they land back on the ground, a new Ground Speed value must be calculated from the X Speed and Y Speed that they have upon impact.
While airborne moving downwards the moment your airborne Ground Sensors collide with the floor, a winning angle value is found by the airborne Ground Sensors, and the Player will land. In the same way, when you are moving upwards and your Ceiling Sensors collide with a ceiling, a winning angle value is found by the Ceiling Sensors, and the Player will attempt to land.
Notes:
- This section describes physics during the moment the Player collides with floors and ceilings while airborne, and then transitions from being airborne to being grounded. For how the Player generally collides with the terrain while grounded, see Ground Sensors and 360 Degree Movement, and for slope physics & momentum while grounded, see Slope Momentum.
- This section explains the physics side of things, for more information about the collision side of things, see Landing On A Floor and Landing On A Ceiling.
- Some of the reactions described ahead are in part determined by what direction the Player was moving in the air, which is the same calculation as noted in Airborne Sensor Activation.
When Falling Downward
When the Player lands on a floor, they will become grounded, a winning angle will be found by the airborne Ground Sensors. Based on this angle, Ground Speed will be set differently.
Note: These angle ranges are not perfectly symmetrical, this is due to the efficient calculation used in the original game, rather than an intentional difference.
The following ranges are inclusive (smaller ranges override larger ranges).
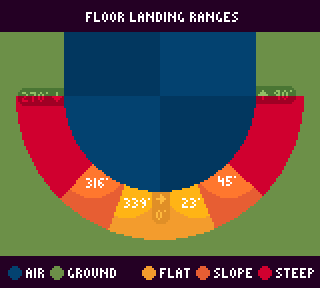
| Range | Values | Result |
|---|---|---|
|
Flat |
0° (255) to 23° (240) and mirrored: 339° (15) to 360° (0) |
The floor landed on is very flat, so Ground Speed can just be set based on the Player's X Speed: Ground Speed is set to the value of X Speed. Ground Angle is set to the angle found by the floor sensors. |
|
Slope |
0° (255) to 45° (224) and mirrored: 316° (31) to 360° (0) |
The slope landed on is slightly steep, so it will use X Speed if the Player was moving horizontally, but will calculate a new Ground Speed based on half of Y Speed if they were moving down: When moving mostly left or mostly right, Ground Speed is set to X Speed.
Otherwise, Ground Speed is set to |
|
Steep |
Any angle outside of Slope range |
The slope landed on is very steep, so it will use X Speed if the Player was moving horizontally, but will calculate a new Ground Speed based on Y Speed if they were moving down: When moving mostly left or mostly right, Ground Speed is set to X Speed.
Otherwise, Ground Speed is set to |
When Going Upward
When the Player lands on a ceiling, a winning angle will be found by the sensors, and based on this angle, the reaction will be different.

When the Player contacts a steep slope above them, they may be able to land and continue along it. Otherwise, they will simply bump their head.
Note: These angle ranges are not perfectly symmetrical, this is due to the efficient calculation used in the original game, rather than an intentional difference.
The following ranges are inclusive (smaller ranges override larger ranges).
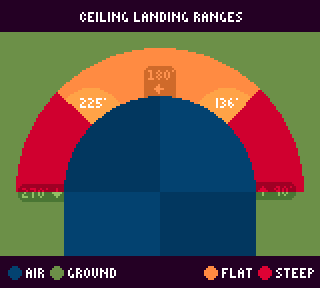
| Range | Values | Result |
|---|---|---|
|
Steep |
Any angle outside of Flat range |
The ceiling is quite steep and can be landed on: When moving mostly up, the Player reattaches to the ceiling (becomes grounded), Ground Speed is set to |
|
Flat |
91° (191) to 225° (66) |
The ceiling is too flat to land on: The Player simply bumps their head on the ceiling, and doesn't reattach to it. Y Speed is set to 0, and X Speed/Ground Speed/Ground Angle are unaffected. |
Notes
- This page is essentially part 2 of 2. This details Player physics and speeds when on slopes. For part 1, describing the Player's terrain collision and 360 degree wall and ceiling collision, go to Slope Collision.